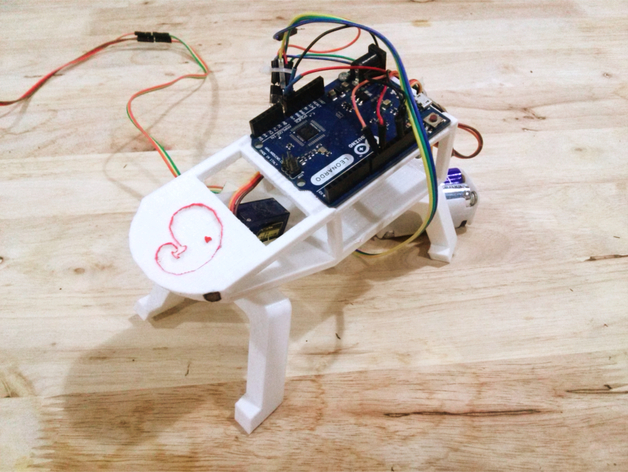
This was a bot we used to teach workshops about using an Arduino to control a walking robot. The robot moved only forward and backward but showed users how to wire up a joystick, power switch, batteries and servos to an Arduino and then program it all to work. // // Code for a 3D Printed Robot // Learn more at: http://www.instructables.com/id/3D-Printed-Robot/ // This code is in the Public Domain // //add the servo library //Create two servo instances Servo myservo; Servo myservo1; int frontPin = 9; int backPin = 10; //Change this numbers until the servos are centered!!!! //In theory 90 is perfect center, but it is usually higher or lower. int FrontBalanced = 91; int BackCentered = 102; int angle = 25; //Variables to compensate for the back center of balance when the front shifts int backRight = BackCentered - 10; int backLeft = BackCentered + 10; int xPin = A4; int yPin = A5; const int FRONT = 1; const int BACK = 2; const int LEFT = 3; const int RIGHT = 4; //Setup initial conditions of the Servos and wait 2 seconds void setup() { myservo1.attach(frontPin); myservo.attach(backPin); myservo1.write(FrontBalanced); myservo.write(BackCentered); // delay(5000); Serial.begin(9600); } void frontLeg(int x) { myservo1.write(x); } void backLeg(int x) { myservo.write(x); } void loop() { int x = analogRead(xPin); int y = analogRead(yPin); Serial.print("x :"); Serial.println(x); Serial.print("y :"); Serial.println(y); int direction = 0; if (x > 700) { direction = BACK; } else if (x < 300) { direction = FRONT; } // if (y > 700) { // direction = RIGHT; // } else if (y < 300) { // direction = LEFT; // } switch (direction) { case FRONT: front(); break; case BACK: back(); break; case LEFT: left(); break; case RIGHT: right(); break; default: straight(); break; } delay(1); } //Walking function void front(){ frontLeg(FrontBalanced + angle); delay(50); backLeg(BackCentered - angle); delay(200); frontLeg(FrontBalanced - angle); delay(50); backLeg(BackCentered + angle); delay(200); } void back(){ backLeg(BackCentered - angle); delay(50); frontLeg(FrontBalanced + angle); delay(200); backLeg(BackCentered + angle); delay(50); frontLeg(FrontBalanced - angle); delay(200); } //Walking function void left(){ frontLeg(FrontBalanced + angle - 5); delay(100); backLeg(BackCentered - angle); delay(300); frontLeg(FrontBalanced - angle - 5); delay(100); backLeg(BackCentered + angle); delay(300); } //Walking function void right(){ frontLeg(FrontBalanced + angle + 5); delay(100); backLeg(BackCentered - angle); delay(300); frontLeg(FrontBalanced - angle + 5); delay(100); backLeg(BackCentered + angle); delay(300); } void straight() { frontLeg(FrontBalanced); backLeg(BackCentered); }
- 0 inches x 0 inches x 0 inches
- this product is 3D printed
- 16 available colors
- material is a strong plastic
- free delivery by Mar 23
- 0 parts