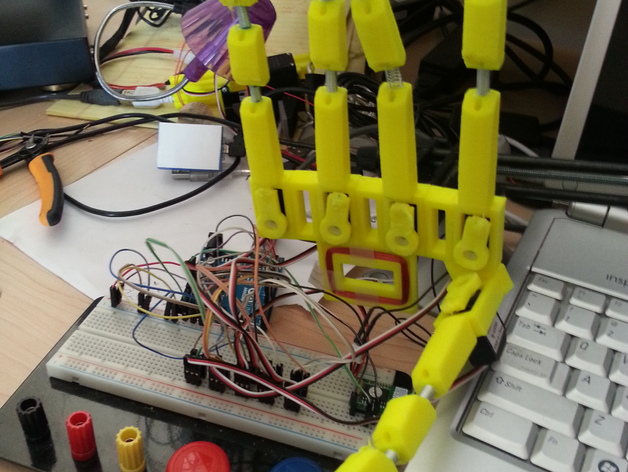
Offloading Neuromechanical Interface Control to Multiplexed Prosthetic Devices using Interactive RFID Enabled Micro-controllers Offloading Neuromechanical Control to Multiplexed Prosthetic Devices using Interactive RFID enabled, Embedded Microcontrollers for both Complex object Manipulation and Globally Assistive Applications For the most part prosthetic devices use non computer enabled mechanical components. The most advanced prototype systems, currently under development, seek to create neuro-mechanical interfaces. These approaches rely on the concept of primary "human control". However, many complex movements are in fact unconscious or “Zombie” programs running in different parts of the brain. In other words, we don’t have to think about them. This project enables the "environment" to allow a prosthetic device to control itself, thereby “off loading” enormous amounts of neural control processing while permitting the device to autonomously perform complex movements and tasks. This experiment multiplexes an RFID sensor and servo actuators within a 3-D printed prosthetic hand. This approach places an RFID antenna in the palm of a 3-D printed prosthetic hand, connecting it to an embedded Arduino-Uno. This allows the prosthetic device to read different RFID tags on objects in the environment. Each tag may be associated with a different set of functions which would determine the movement of individual servo motors. This could give the prosthetic device the ability to execute different complex movements depending on which RFID tag is read by the antenna. It may be possible to include a broad range of sensors within the 3-D printed prosthetic hand to expand innate human capabilities. This might even include data loggers to "remember" the life experience of the prosthetic device and a broad range of unique sensors. Background The field of prosthetics has experienced major advances over the centuries. Unfortunately many of these advances have been associated with human conflict (for example, injured war fighters). For the most part, “smart” prosthetic devices have only recently become available, however they are often very expensive and rarely are they “customized” to an individual’s preferences or needs. Fortunately, the development of truly affordable embedded electronics, inexpensive 3-D scanning software and low cost 3-D printing platforms (in an open access environment) has revealed shocking new possibilities at an unprecedented pace of development and practical application. Experimental Design Step 1: Configure Arduino UNO to read an RFID tag Step 2: Configure Arduino UNO to control a 9g mini servo motor Step 3: Write Arduino sketch to move servo after reading RFID tag Step 4: Modify sketch to move different servos with different tags Step 5: Design and 3D print prototype fingers with servo mounts Step 6: Revise design to use springs as joints Step 7: Combine servos, RFID Antenna, 3D printed parts and Arduino. Guino “Guino” is a free Arduino Dashboard that allows a user to send information from the Arduino board, over the serial port and view this information on a host computer. This program shows the current position of each servo motor, the unique tag number identified by the RFID antenna and the action (“function” in the arduino sketch) that is linked to that tag. This dashboard need not be connected to the prosthetic, but allows a convenient means of illustrating the microcontroller actions. Results Each of three tags was brought close to the RFID Antenna, 100 times. The number of times that the system correctly identified the tag number and correctly executed the appropriate function were recorded in tabular form. For these 300 separate tests, there were zero incorrect tag identifications and 100% success in executing the appropriate function in the Arduino sketch (embedded microcontroller). For this series of tests, the antenna, microcontroller and servo motors performed reliably. The finger design is unique to this project. The mechanical properties of the “spring” joints can be changed by using different springs, varying the length of the springs between the segments or by using more than one spring in the joint. Conclusion This project has demonstrated that it is possible to offload neuromechanical control for complex movements to an RFID enabled prosthetic device. An embedded microcontroller correctly identifies several unique RFID tags. Each RFID tag, when identified by the embedded microcontroller, is able to trigger a specific function in the Arduino script which in turn controls the movement of 5 separate servo motors in the prostatic hand. This project demonstrates that complex movements corresponding to tasks such as “grasp”, “pinch”, and “count” are easily and reliably achievable. Embedding “Capsule RFID tags” in the tips of each prosthetic finger, would allow an interactive work station to identify at least 5 different, unique, RFID signals and respond accordingly to the presence of the prosthetic device. This project has used the free “Guino” serial report monitor to display the interactive data stream between the RFID antenna, various types of RFID tags, the embedded microcontroller, and the Servo motors. Summary: This project demonstrates a potentially useful approach to offloading neuromechanical interface control for both complex object manipulation and globally assistive prosthetic applications. Future Applied Research and Development Temperature and Hall effect sensor (magnetic fields) Individual human scanned and 3D printed prosthetics 2-3 axis tilt sensor for release and pick up 2-3 axis accelerometer for speed and direction Capacitive Touch sensor for direct computer interface Infra Red (IR) proximity sensor Position sensing servos, “inverse kinetic” training RFID Capsules in finger tips for workstation interactions Wi-Fi prosthetic to prosthetic and remote between people Smart phone “App” reprogramming and QR code reader NFC Near Field Communication between limbs (walking) This high school science project was overseen by: Dr. R. Siderits at RWJUHH Awards
- 0 inches x 0 inches x 0 inches
- this product is 3D printed
- 16 available colors
- material is a strong plastic
- free delivery by Jul 23
- 0 parts